Klient otrzymał rozwiązanie spełniające wszystkie założenia określone w zapytaniu ofertowym. Na liniach zamontowano po dwa roboty, systemy przygotowania lamp oraz obrotnice wspomagające pracę operatorów.
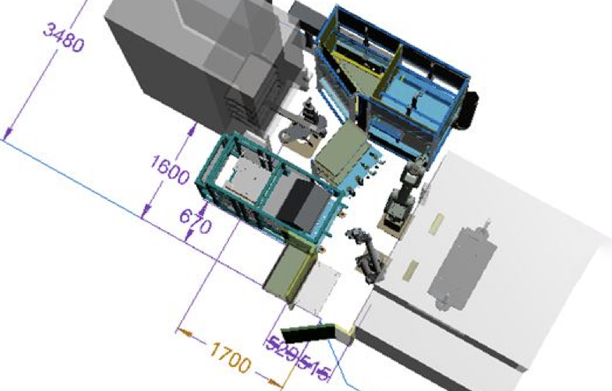
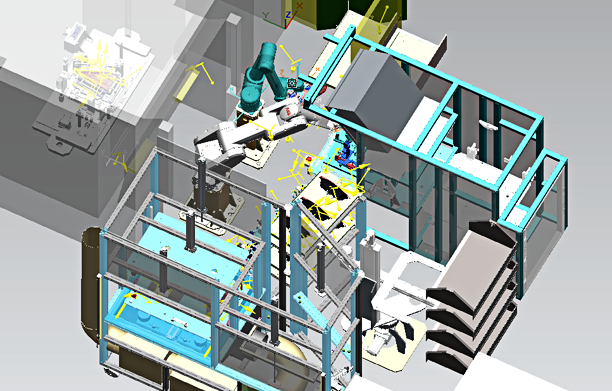
Operator montuje housing oraz lens na stacji dekontaminacji i rozpoczyna cykl pracy automatycznej. Na stacji dekontaminacji następuje jonizacja oraz przedmuch zamontowanych przez operatora detali. Po zakończonym cyklu czyszczenia, następuje pobranie housingu oraz lensa przez robota ABB i umieszczeniu obu elementów w stacji zgrzewania ( Branson ). Po wykonanym zgrzaniu dwóch elementów ze sobą, następuje przeniesienie całej lampy do stacji pomiarowej 3D. Lampę tą przenosi Uniwersal Robot UR. Gdy pomiar ze stacji 3D jest poprawny, robot ABB przenosi lampę na jedną z 3 pozycji na palecie buforowej. Po wypełnieniu wszystkich 3 pozycji na palecie buforowej, cała paleta jest przenoszona za pomocą manipulatora obrotowego do pieca. Całość w piecu jest wygrzewana przez około 60 sekund, po czym następuje oddanie palety z wygrzanymi lampami do operatora.